http://techon.nikkeibp.co.jp/article/NEWS/20080403/149950/
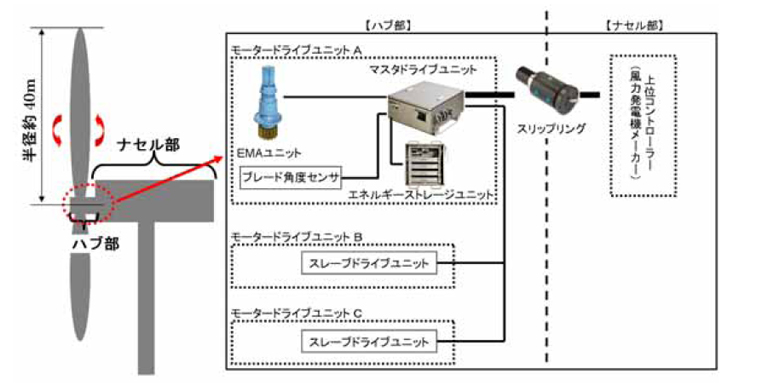
日本ムーグは,風力発電機のブレードピッチ制御システムを開発,風力発電機市場に本格参入する。富士重工業の「SUBARU 80/2.0」(定格出力2.0MW)への採用が決まっており,日本ムーグでは他社新型機種への供給も目指す。 ピッチ制御システムは,風力発電機の設置環境における風の状況に応じて,ブレードの向き(角度)を変えるための装置。風が弱い状況では回転速度が上がるように,逆に風が強すぎる状況では回転速度が下がるようにブレード角度を制御することで,安定的に定格値で発電できるようにすることが目的である。同社のピッチ制御システムには,風力発電機自体の破壊に至る荷重が発生するような暴風の際に風を受け流したり,振動や騒音を防いだりする機能もある。 定格出力が数MWクラスの大型発電機では,出力を高めるためにブレード長を伸ばす(受風部を拡大する)傾向にあり(例えばSUBARU 80/2.0の受風部直径は80m),強度の要件が厳しくなっている。加えて,天頂部と天底部では風速にはかなりの差があり,ブレードの位置によっても最適なブレード角度は異なる。従って,安全性や発電効率の観点から,ピッチ制御システムの重要性が高まっていると,日本ムーグ代表取締役社長(米Moog社インターナショナルグループ副社長,アジア・太平洋地域統括マネージャー)のSean Gartland氏は語る。 同システムは,ブレード角度を実際に変える「EMA(電動アクチュエータ)ユニット」,EMAユニットを制御する「スレーブドライブユニット」,全体の指令部に相当する「マスタドライブユニット」,マスタドライブユニットと上位コントローラ(風力発電機自体の指令部)を電気的に接続するための「スリップリング」,ブレード角度を検出するためのセンサなどから成る。 スレーブドライブユニットとマスタドライブユニットは,ブレードを支持しているハブ内部に搭載されており,ブレードと一緒に回転移動している。スリップリングは,回転移動しているマスタユニットと接続するための機構を備えている。 EMAユニットは,ACサーボモータや減速機,電磁ブレーキなどで構成されている。基本的に,ブレードと同じ数(SUBARU 80/2.0の場合は3個)が搭載される。スレーブドライブユニットの数もEMAユニットと同じだが,うち1個はマスタドライブユニットが兼ねる。さらに,マスタユニットは遠隔操作でメンテナンスを行うための通信機能も備えている。マスタドライブユニットは,上位コントローラやその他外部との相互通信機能を有することだけが,スレーブドライブユニットと異なる。 マスタドライブユニットは,定期的に上位コントローラからの指令(具体的なブレード角度)を受け取り,それを各スレーブドライブユニットに伝達。EMAユニットを通じて,ブレード角度を変更する。また,角度センサからのフィードバックを受け取り,ブレード角度の変更が正しく行われたかどうかを検証している。これら一連の動作によって,各ブレードの個別制御を実現している。 日本ムーグでは,同システムの技術的な仕様を富士重工業と共同で策定,2007年4月から約6カ月にわたって実機での評価試験を行った。富士重工業によれば,SUBARU 80/2.0は2008年中に20台前後の出荷が見込まれるという。
【訂正】記事掲載当初,SUBARU 8.0/2.0のブレード長が80mと読み取れる表現になっていまいた。正しくは,受風部直径(ロータ直径)が80mです。当該個所(赤字部分)は修正済みです。
ここにはトップやアーカイブページで省略される(記事単独ページでだけ表示される)文章を書きます。
0 件のコメント:
コメントを投稿